Na física, quando se estuda os fenômenos, avalia-se e mede-se as grandezas físicas. Elas devem transmitir as informaçőes de modo completo para quem as utiliza. Ouve-se rotineiramente nos serviços de meteorologia as informaçőes sobre a temperatura: “Amanhă no Rio fará 42şC”. Quem assiste ao boletim consegue imaginar que o dia será de muito “calor”. Também ouve-se muito de motoristas em que o carro quebrou na rua: “ … empurrei ele para cima da calçada. Fiz bastante força...” Quem só ouve isso pode imaginar de diversas formas a cena, o motorista atrás do carro empurrando para frente, na frente empurrando para trás ou na lateral, manobrando ao volante e empurrando ao mesmo tempo. Ou seja, o ouvinte, só com as informaçőes fornecidas, năo tem como imaginar de imediato a forma que se desenrolou a cena. O motorista fez força1 e informou que “ fez bastante força, informou a magnitude da força. Mas quem ouve perguntará onde ele estava empurrando. Assim o motorista terá que informar mais um dado. Desta maneira percebe-se que a força só pode ser bem interpretada se for fornecido mais de uma informaçăo. Para ser mais correto, tręs informaçőes, pois ele empurra, mas poderia puxar também.
Assim na física as grandezas que necessitam tręs informaçőes para ser bem entendida săo chamadas de GRANDEZAS VETORIAIS, em oposiçăo ŕquelas que necessitam somente de uma informaçăo e que săo chamadas de GRANDEZAS ESCALARES.
As duas grandezas físicas, escalares e vetoriais săo representadas por entes matemáticos chamados de ESCALAR e VETOR, respectivamente. Uma terceira grandeza física chamada TENSORIAL e representada por TENSORES é uma expansăo do conceito de vetor. Esta terceira grandeza necessita de 9 informaçőes para ser ber definida ( 9 escalares ou 3 vetores)
Um escalar indica a intensidade da grandeza (módulo), a unidade de medida da grandeza representada e, nos casos em que os valores da grandeza podem assumir números negativos, sinal. Eles também seguem as regras e propriedades da álgebra numérica.
Um vetor contém tręs informaçőes em uma única representaçăo. Estas informaçőes săo:
módulo (intensidade): valor numérico da grandeza;
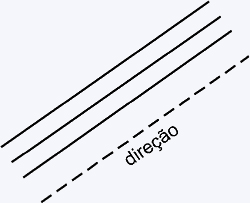
direçăo: é a característica que um feixe de retas paralelas tem em comum, representada na Figura 1.1-a
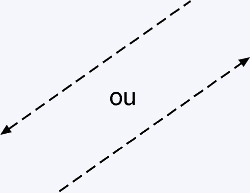
Sentido: é o lado, numa direçăo que a grandeza está sendo aplicada, mostrado na figura Figura 1.1-b
| a)
|
b)
|
| Figura 1.1: Representaçăo Gráfica da direçăo e sentido. Em A) Retas de mesma direçăo (paralelas) e em B) vetores de sentidos opostos. | |
Um vetor é um ente matemático representado graficamente por um SEGMENTO ORIENTADO DE RETA (seta ou flecha), mostrado na figura . O vetor começa no ponto A, chamada de origem e termina no ponto B, chamada de ponta, formando o segmento orientado AB com orientaçăo de A para B. Ele possui um nome representado por uma letra e uma seta acima desta. A letra e a seta devem ser interpretados como um único símbolo, indicando que o elemento se trata de um vetor. Esta representaçăo é mostrada na Figura 1.2-a. Outras formas também săo utilizadas, mostradas na Figura 1.2-b. A forma com acento circunflexo é utilizada para representar um versor (vetor unitário). Quando a letra parece sem a seta, ela deve ser interpretada como sendo somente o módulo do vetor.
|
a) |
b) |
 |
 |
|
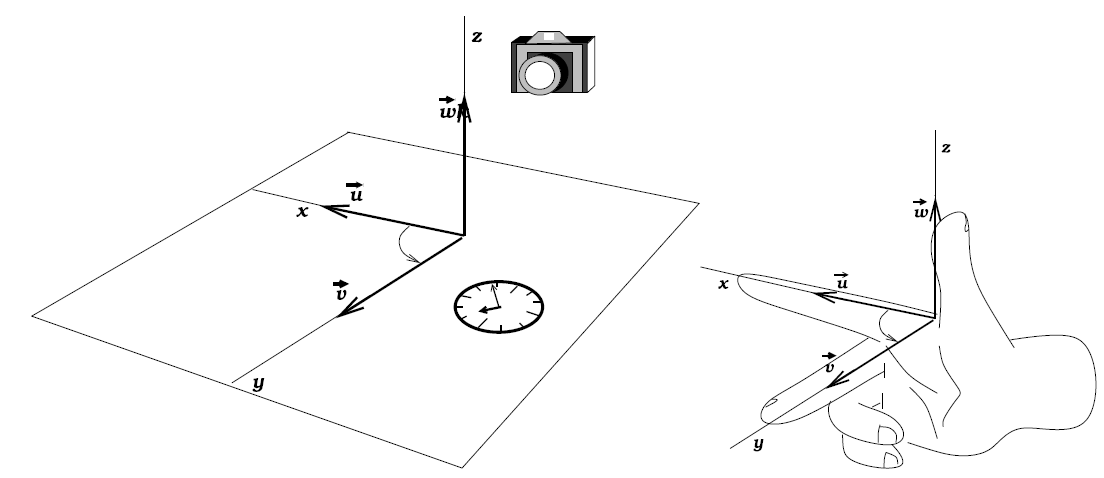
| Figura 1.2: Representaçăo Gráfica da direçăo e sentido. Em A) Retas de mesma direçăo (paralelas) e em B) vetores de sentidos opostos. | Figura 1.3: Eixos definidos e seus respectivos versores. (a) em 2D e (b) em 3D. | |||
O módulo do vetor é representado pelo comprimento do segmento de reta. Num gráfico em escala, o tamanho representa fielmente a grandeza real que pode ser mensurada pela medida do tamanho do segmento com o auxilio de uma régua. Por exemplo, num gráfico de forças em que a escala seja 1:100 ( 1 cm para 100 N), um vetor que tenha o tamanho de 2 cm representa uma força de 200 newton2 Por outro lado, em gráficos sem escala, o tamanho do segmento é apenas uma indicaçăo qualitativa, vetores grandes indicam grandezas de valore maiores, vetores de tamanho menor, grandezas de valores menor. Assim o módulo é representado junto ao vetor pelo seu nome sem o sinal da seta acima deste.
A direçăo é representada de diversas formas, a mais simples usa-se as pontos cardeais, por exemplo, direçőes Norte-Sul, Leste-Oeste, Nordeste-Sudoeste, etc. Outra forma matematicamente mais rigorosa é a utilizaçăo do círculo trigonométrico e uma direçăo referencial. A direçăo é definida pelo ângulo3 formado pela reta direcional e o eixo referencial.
Num sistema de coordenadas definidos pelos eixos direcionais e seus respectivos vetores unitários (versores)4, conforme a Figura 1.3, em (a) em duas dimensőes (2D) (a) e em tręs dimensőes (3D):
onde as relaçőes săo:
|
|
(1.1) |
O vetor pode ser representado pelo par de coordenadas na forma (x ; y) ou por uma expressăo algébrica utilizando os vetores unitários:
|
|
(1.2) |
As coordenadas podem ser obtidas dos pontos que formam o vetor, onde as coordenadas do vetor săo:
|
|
(1.3) |
Uma outra forma de representar os vetores é utilizando a notaçăo matricial. Nesta as equaçőes (1.2) ficam:
|
|
(1.4) |
Um vetor só é igual a outro se, e somente se os módulos, as direçőes e os sentidos forem iguais. A Figura 1.4 mostra casos onde os vetores năo săo iguais. No caso a, eles săo diferentes pois os módulos săo diferentes, no b, eles săo diferentes pois, mesmo tendo mesmo tamanho (módulo) e direçăo (paralelos), tem sentidos diferentes. E no caso c eles săo diferentes, pois tem direçőes diferentes. Pode-se comparar sentidos de vetores de mesma direçăo, em vetores de direçőes diferentes năo tem significado comparar os sentidos.
 |
 |
 |
| Figura 1.4: Desigualdade de vetores. Os vetores săo desiguais em a) pelo módulo; em b) pelo sentido e em c) pela direçăo. | ||
Na Figura 1.5 tem-se tręs exemplos de pares de vetores iguais. Em todos os tręs exemplos, tanto os módulos como as direçőes e os sentidos săo iguais.
a)
 |
|
| Figura 1.5: Exemplos de igualdade de vetores. | |
As operaçőes com vetores năo seguem as mesmas regras da álgebra
de escalares, pois além do módulo, tem-se que considerar a direçőes
e sentidos dos membros na operaçăo. A operaçăo com vetores é
realizada, de forma mais simples, em duas etapas. A primeira etapa é
a “operaçăo gráfica”, após faz-se a operaçăo algébrica.. A
segunda etapa pode ser desconsiderada em gráficos com escala de
valores, mas năo nos gráficos sem escalas (qualitativos). Estas
duas etapas constituem um modo de resoluçăo mais intuitivo. As
operaçőes também podem ser realizadas com os vetores escritos na
forma cartesiana (eq.1.2).
Definindo dois vetores a e b, colineares representados na figura 1.6:
 |
|
Figura 1.6: Vetores colineares
|
A soma será dividida em quatro casos diferentes. Os tręs primeiros, em suma, săo casos especiais do último, podendo ser calculados pelo último.
Vetores colineares săo vetores que possuem mesma direçăo e
sentido. Definindo os vetores![]() e
e
![]() ,
conforme a Figura 1.6, cujos módulos săo, respectivamente, a
e b. A operaçăo:
,
conforme a Figura 1.6, cujos módulos săo, respectivamente, a
e b. A operaçăo:
|
|
(1.5) |
é, graficamente vista na Figura 1.7.
 |
| Figura 1.7: Resultante
|
O procedimento é simples, Escolhe-se um dos dois vetores como primeira parcela5
, reproduz-se o escolhido num novo diagrama. O outro vetor (segunda parcela é
reproduzido de tal modo que seu ponto inicial coincida com o ponto final do
anterior. Se houver mais parcelas, redesenha-se cada uma da mesma maneira, ou
seja o ponto inicial de um vetor coincide com o ponto final do anterior6.
O vetor soma7
terá seu ponto inicial no ponto inicial do primeiro vetor parcela
colocado no diagrama e seu ponto final no ponto final do último
vetor parcela reproduzido. A Figura 1.7 mostra o vetor![]() ,
resultante da adiçăo de
,
resultante da adiçăo de![]() e
e
![]() ,
mostrando a direçăo e o sentido e, percebe-se que o módulo do
vetor resultante, r é a soma algébrica dos módulos dos
vetores
,
mostrando a direçăo e o sentido e, percebe-se que o módulo do
vetor resultante, r é a soma algébrica dos módulos dos
vetores
![]() e
e
![]() ,
ou seja:
,
ou seja:
|
|
(1.6) |
 |
|
Figura
1.8: Vetores antiparalelos |
Vetores antiparalelos săo vetores que possuem a mesma direçăo e
sentidos opostos. Definindo os vetores![]() e
e
![]() ,
conforme a Figura 1.18, cujos módulos săo, respectivamente, a
e b. A operaçăo:
,
conforme a Figura 1.18, cujos módulos săo, respectivamente, a
e b. A operaçăo:
|
|
(1.7) |
é, graficamente vista na Figura 1.9.
 |
|
Figura
1.9: Resultante
|
O procedimento é idęntico ao anterior, reproduzindo o primeiro
vetor num novo diagrama, em seguida reproduzido o segundo vetor, com
seu ponto inicial coincidente ao ponto final do vetor anterior. O
vetor soma terá seu ponto inicial no ponto inicial do primeiro vetor
parcela colocado no diagrama e seu ponto final no ponto final do
último vetor parcela reproduzido, também como no anterior. A Figura
1.9 mostra o vetor
![]() ,
resultante da adiçăo de
,
resultante da adiçăo de![]() e
e
![]() ,
mostrando a direçăo e o sentido e, percebe-se que o módulo do
vetor resultante, r é a subtraçăo algébrica dos módulos
dos vetores
,
mostrando a direçăo e o sentido e, percebe-se que o módulo do
vetor resultante, r é a subtraçăo algébrica dos módulos
dos vetores![]() e
e
![]() ,
ou seja:
,
ou seja:
|
|
(1.8) |
 |
|
Figura
1.10: Vetores perpendiculares |
Vetores perpendiculares săo vetores formam um ângulo reto ( π rad ou 90ş). Definindo os
vetores![]() e
e
![]() ,
conforme a Figura 1.10, cujos módulos săo, respectivamente, a
e b.
,
conforme a Figura 1.10, cujos módulos săo, respectivamente, a
e b.
A operaçăo:
|
|
(1.9) |
é, graficamente vista na Figura 1.11.
 |
|
Figura
1.11: Resultante
|
|
|
(1.10) |
 |
Figura 1.12: Figuras geométricas formadas pelos módulos dos vetores parcelas e soma. |
O ângulo α é calculado a partir da funçăo trigonométrica tangente definida a partir dos triângulos retângulos, que é:
|
|
(1.11) |
que para o triângulo da Figura acima resulta:
|
|
(1.12) |
Assim calculando o ângulo direcional.
 |
| Figura
1.13: Vetores quaisquer |
Este caso de adiçăo é o mais geral. Todos os tręs anteriores
podem ser resolvidos poe esta maneira. Definindo os vetores![]() e
e
![]() ,que
fazer entre si um ângulo θ
conforme a Figura 1.13, cujos módulos săo, respectivamente, a
e b.
,que
fazer entre si um ângulo θ
conforme a Figura 1.13, cujos módulos săo, respectivamente, a
e b.
A operaçăo:
|
|
(1.13) |
é graficamente vista na Figura 1.14.
 |
Figura
1.14: Resultante |
 |
A nela vę-se o vetor
![]() ,
resultante da adiçăo de
,
resultante da adiçăo de![]() e
e
![]() ,
sua direçăo (ângulo α)
e o sentido. Na Figura 1.14-a a adiçăo é mostrada pela regra do
paralelogramo8
O módulo do vetor resultante, r deve ser calculado com o
auxílio da lei dos cossenos adaptada ao ângulo θ e aos módulos, como no triângulo
formado na Figura 1.14, ou seja::
,
sua direçăo (ângulo α)
e o sentido. Na Figura 1.14-a a adiçăo é mostrada pela regra do
paralelogramo8
O módulo do vetor resultante, r deve ser calculado com o
auxílio da lei dos cossenos adaptada ao ângulo θ e aos módulos, como no triângulo
formado na Figura 1.14, ou seja::
|
|
(1.14) |
Se os vetores![]() e
e
![]() estiverem
na forma algébrica (eq. 1.2):
estiverem
na forma algébrica (eq. 1.2):
|
|
(1.15) |
A adiçăo
![]() é:
é:
|
|
(1.16) |
que é válida para qualquer soma. Nesta maneira de escrever o vetor, o módulo:
|
|
(1.17) |
e o ângulo de
inclinaçăo de
![]() com
a horizontal é:
com
a horizontal é:
|
|
(1.18) |
Na álgebra de escalares, utiliza-se regras de sinal para simplificar a expressăo:
|
|
(1.19) |
onde a operaçăo de adiçăo se transformou numa operaçăo de subtraçăo. De modo inverso se houver uma subtraçăo, pode-se convertę-la numa adiçăo, conforme a seguinte passagem:
|
|
(1.20) |
A mesma lógica é utilizada na álgebra vetorial, ou seja, a operaçăo:
|
|
(1.21) |
é transformada numa adiçăo de modo que:
|
|
(1.22) |
de modo que os
operadores da adiçăo săo, agora,
![]() e
e![]() .
Este segundo vetor é definido a partir de
.
Este segundo vetor é definido a partir de![]() .
O sinal altera o sentido do vetor, se modo a permanecer inalterados
módulo e direçăo. Se o vetor
.
O sinal altera o sentido do vetor, se modo a permanecer inalterados
módulo e direçăo. Se o vetor
![]() é
definido conforme a Figura 1.13, o vetor
é
definido conforme a Figura 1.13, o vetor
![]() é:
é:
 |
|
Figura 1.15: Definiçăo de
|
Desta forma a subtraçăo9 se torna um caso da adiçăo e um dos quatro casos de adiçăo deve ser utilizado para a resoluçăo. A resoluçăo entăo desta adiçăo tem como resultado exatamente o valor da subtraçăo.
A multiplicaçăo de vetores se divide em tręs casos. Nos dois primeiros casos os operadores săo vetores e no terceiro um é vetor e o outro é um valor escalar (numérico).
O produto escalar ou interno é a operaçăo entre dois vetores que resulta num escalar.
Definindo dois vetores:
|
|
(1.23) |
o produto escalar
entre
![]() e
e
![]() é:
é:
|
|
(1.24) |
Pode-se interpretar o produto escalar como o módulo da projeçăo do
vetor
![]() na
direçăo do vetor
na
direçăo do vetor
![]() .
que é mostrado geometricamente na Figura 1.16 em 2D.
.
que é mostrado geometricamente na Figura 1.16 em 2D.
 |
Figura
1.16: Projeçăo de
|
No produto escalar, săo válidas as propriedades:
|
|
(1.25) |
Também temos o produto escalar definido pelos módulos dos vetores e o ângulo formado por eles:
|
|
(1.26) |
Esta definiçăo para produto escalar, resulta numa nova definiçăo para cosseno de um ângulo:
|
|
(1.27) |
1.3.3.2
Produto vetorial ou produto externo
O produto vetorial ou produto externo é a operaçăo com vetores que
resulta num vetor perpendicular aos operadores. Definindo dois
vetores
![]() e
e
![]() conforme
Figura 1.17:
conforme
Figura 1.17:
|
|
|
Figura 1.17: vetor resultante
|
Também pode-se definir os vetores algebricamente conforme (1.23)
que, e o produto vetorial de![]() e
e
![]() é:
é:
|
|
(1.28) |
uma forma compacta.
O módulo do vetor resultante do produto vetorial pode ser calculado utilizando a relaçăo algébrica:
|
|
(1.29) |
O produto vetorial possui as seguintes propriedades:
|
|
(1.30) |
e a área do polígono formado pelos vetores, como na Figura 1.18, é dada também pelo módulo do produto vetorial, ou seja:
|
|
(1.31) |
 |
Figura 1.18: Polígono formado pelos vetores |
Definindo o vetor
![]() de
módulo g, de acordo com a Figura 1.19:
de
módulo g, de acordo com a Figura 1.19:
![]()
Figura 1.19: Vetor a.
e o escalar a, o
vetor
![]() ,
resultante de:
,
resultante de:
|
|
(1.32) |
será um vetor de módulo igual a:
|
|
(1.33) |
direçăo igual a do
vetor
![]() e
sentido, conforme a Figura 1.20-a, igual a
e
sentido, conforme a Figura 1.20-a, igual a
![]() se
a > 0 e oposto a
se
a > 0 e oposto a
![]() ,
conforme a Figura 1.20-b, se a < 0:
,
conforme a Figura 1.20-b, se a < 0:
|
a) |
b)
|
| Figura 1.20: Vetor
resultante f do produto a
|
|
A decomposiçăo na matemática é a operaçăo que encontra um conjunto de elementos que operados resultam no valor a ser decomposto e que segue algumas regras pré-definidas. Por exemplo a decomposiçăo por fatores primos. A operaçăo sobre os elementos é a multiplicaçăo e só pode-se incluir números primos. Desta maneira decompondo o valor 120 em fatores primos, através de divisőes sucessivas de quociente inteiro e resto nulo, pelos primos de menor valor possível:
|
|
(1.34) |
Assim pode-se reescrever 120 por fatores primos:
|
|
(1.35) |
A mesma lógica é empregada na decomposiçăo de vetores. Sendo que o vetor é formado por parcelas, a quantidade destas depende da quantidade de dimensőes envolvidas,. por exemplo: duas dimensőes (2D), duas parcelas, tręs dimensőes (3D), tręs parcelas, etc10. A soma das parcelas, obrigatoriamente será:
|
|
(1.36) |
Definindo o vetor![]() ,
em 2D, conforme a Figura 1.21, deve-se escolher as duas parcelas
(
,
em 2D, conforme a Figura 1.21, deve-se escolher as duas parcelas
(![]() e
e![]() )
de tal modo que:
)
de tal modo que:
|
|
(1.37) |
 |
Figura
1.21: Definiçăo do vetor
|
Segue-se o procedimento a seguir:
 |
Figura 1.22: Projeçăo do vetor
|
Escolhe-se um dos eixos para iniciar;
traça-se uma reta paralela ao outro que passe na extremidade do vetor e que corte o eixo inicial;
o segmento de reta entre a origem e o ponto de corte define a
projeçăo do vetor
![]() no
eixo x, o vetor
no
eixo x, o vetor
![]() conforme
Figura 1.22.
conforme
Figura 1.22.
traça-se uma reta paralela ao primeiro eixo que passe na extremidade do vetor e corte o eixo final;
o segmento de reta entre a origem e o ponto de corte define a
projeçăo do vetor
![]() no
eixo y, o vetor
no
eixo y, o vetor
![]() ,
conforme Figura 1.23.
,
conforme Figura 1.23.
 |
Figura
1.23: Projeçăo do vetor
|
Se o gráfico estiver em escala, para se saber o módulo das
projeçőes, basta medi-las com uma régua e aplicar a escala para
saber o seu valor real. Por exemplo, se o vetor
![]() representa
uma velocidade, suas projeçőes também representam velocidades em
cada eixo e o gráfico possuir escala de 1 cm : 10 m/s, cada cm
medido no gráfico equivale a uma velocidade de 100 m/s. Se a medida,
com a régua, de uma das distâncias for 5 cm, o vetor representará
50 m/s de módulo.
representa
uma velocidade, suas projeçőes também representam velocidades em
cada eixo e o gráfico possuir escala de 1 cm : 10 m/s, cada cm
medido no gráfico equivale a uma velocidade de 100 m/s. Se a medida,
com a régua, de uma das distâncias for 5 cm, o vetor representará
50 m/s de módulo.
Percebe-se que se forma um retângulo entre os vetores projeçăo![]() e
e![]() ,
as retas auxiliares e os eixos, onde a diagonal deste, o vetor
,
as retas auxiliares e os eixos, onde a diagonal deste, o vetor
![]() ,
divide-o em dois triângulos retângulos iguais, representados na
Figura 1.24-a. Utilizar-se-á o triângulo de baixo11,
representado vetorialmente pela figura Figura 1.24-b ou escalarmente
pela Figura 1.24-c. No cálculo mais simplificado o utilizaçăo do
triângulo com os valores escalares se mostra mais útil. E desta
maneira que se inicia a etapa numérica.
,
divide-o em dois triângulos retângulos iguais, representados na
Figura 1.24-a. Utilizar-se-á o triângulo de baixo11,
representado vetorialmente pela figura Figura 1.24-b ou escalarmente
pela Figura 1.24-c. No cálculo mais simplificado o utilizaçăo do
triângulo com os valores escalares se mostra mais útil. E desta
maneira que se inicia a etapa numérica.
 |
 |
 |
| Figura 1.24: Figuras geométricas formadas pelos vetores, linhas auxiliares e eixos. Em a) o retângulo formado com os vetores, linhas auxiliares e eixos, em b) o triângulo inferior formado pelos vetores e, em c), o triangulo equivalente com a medida dos módulos. | ||
As funçőes trigonométricas definidas pelas relaçőes em triângulos retângulos săo:
|
|
(1.38) |
que equivalem, no triângulo da Figura 1.24-c, a seguinte relaçăo:
|
|
(1.39) |
Aplicando as relaçőes trigonométricas (1.38) considerando as relaçőes (1.39) tem-se:
|
|
(1.40) |
ou na forma mais relevante:
|
|
(1.41) |
As expressőes (1.41) fornecem os valores numéricos (módulos) dos
vetores projeçăo
![]() e
e![]()
1 A força será definida pelas leis de Newton.
2 Unidade de media de força que será definida pelas leis de Newton
3 Preferencialmente medir ângulos em radianos. Em alguns casos pode-se utilizar graus e fraçőes decimais de graus.
4 Versor (vetor unitário) é um vetor que tem módulo 1 e indica as direçőes ortonormais que definem um espaço vetorial. Cada espaço, dentre os quais, o cartesiano (retangular), cilíndrico e esférico, possui um conjunto de versores diferentes. A relaçăo entre versores de espaços diferentes será visto mais adiante.
5 A propriedades da adiçăo de escalares săo válidas para adiçăo de vetores.
6 Como na adiçăo de números, pode-se somar mais de dois vetores ao mesmo tempo. Desde que se siga as regras de reproduçăo dos vetores parcelas.
7 O vetor que resulta de uma operaçăo de aritmética também é chamado de resultante. Este termo é bastante empregado na literatura em detrimento do nome das partes da operaçăo.
8 A regra do paralelogramo utiliza os traços auxiliares paralelos aos vetores que passam pelo extremo do outro de modo a formar um paralelogramo. A origens dos vetores operandos replicados num novo gráfico devem estar no mesmo ponto. Na decomposiçăo de vetores utiliza-se novamente este método.
9 As propriedades da subtraçăo de escalares se aplica a subtraçăo de vetores.
10 Em uma dimensăo (1D) o vetor e a parcela serăo absolutamente iguais.
11 O uso do triângulo superior levaria aos mesmos resultados finais. Os ângulos deste podem ser descobertos apenas utilizando a teoria de feixe de paralelas cortadas por uma reta transversal e o fato de que a soma dos ângulos internos do triângulo é igual a π rad (180ş) .
12 A funçăo “sin α” se refere a funçăo seno α (sen α), No corpo do texto utiliza-se sen, mas nas expressőes matemáticas aparece como “sin”.
 .
. .
. .
. ;
;
 .
. ;
; .
. ;
; ;
;
 ;
; .
.
 .
. ;
;